Su-30SMはPESA+AESA のハイブリッドじゃ無かったっけ?
何その頭痛が痛いみたいなやつ
確かにめちゃくちゃ変なこと言ってて笑った。普通に調べて来たらPESAだったし運営のミス?それか他のPESA搭載機で同じようになるか検証するとか?PESA搭載機何か知らないけど
他のPESA搭載機(Su34)でも同様だったよ。PESAレーダーの動作速度はとんでもないからAESAみたいに本当に同時追跡してるんじゃなくて捜索中に一瞬だけビーム向けて更新してるのかも
位相変化だけでビームが曲げられる範囲内(su-30の場合はスキャンゾーンの中心から左右45度の範囲)なら常時更新されるってのは許せるとして機械走査でアンテナ自体を傾けて補ってる範囲まで常時更新されるのはちゃうやん!って話 上の枝に付いてる葉のリンクを機械翻訳でもいいから見てくれ最大±45°の電子走査って書いてあるから
ただまあ個人的には90°もあれば一番広いTWSの走査範囲よりなお10°も広いし実用上はそこまで問題は無いと思う。それよりは現状レーダーの俯仰角が±40なのが地味にきつい上のデータで±45°になってるがこれは修正されるのだろうか
ほなら上下も機械式で70°動くんとちゃうん
↑電子走査アレイなら機械的に動かないのでは?各素子が電気的に位相を変化させるから、機械的な部品が一切ないもんだと思ってたが・・・
>> 1126縦が40度なのは縦方向のジンバルが付いてないからだと思う
旧来のレーダーで言うところの機械走査はしない。それはAESAでもPESAでも同じ。位相走査範囲を広げるために首振りするものはある。ただそれを表現するならば”走査範囲”自体が左右に移動するのでWTのは未だなんちゃってフェーズドアレイでしかない。
いや上のリンクデータで俯仰角±45°だから現状の40°だとおかしくないということなんだが
PESAとAESAのハイブリッドであってるぞ。Su-30SMのN011Mは送信側にPESA、受信側にAESAの技術(LNAの3dB、独立した受信アンプなど、USやEUのAESAとよく似た技術)が使われてる。
このリンクの最大±45°電子スキャン(до ± 45° электронное сканирование)が事実ならレーダーが一番左の範囲をスキャンしていた場合画像の黄色部分にはビームを向けられないはずでこの範囲に敵が入ってもトラックが続くのはおかしくないか?と思っています
それを指摘するならAESAだろうと等しくおかしいだろうと言ってる。
AESA(ラファール,クフィル)は別にフェーズドアレイ+機械走査ジンバルを使った首振りの組み合わせじゃなくてフェーズドアレイ単体で動いてるから上の画像で行ってる黄色の範囲は存在しないし問題ないと思ってる >> 1135さんはdevのA(P)ESAのアップデート内容確認してる?今のdevは一度発見した敵がスキャン範囲外に出ても座標の更新が行われるようになってる
そこはgaijinが独自の仕様を作り出してるから分からん。完全に架空の仕様だよ。AESAが強くなりすぎないように(スキャンエリアを制限する意図?)よく分からん調整をしてるのかもしれない
常時更新される範囲はともかく±90°とする話の方が多いけどなリンク
多分この部分よね 90 degrees for surface search modesって事は対地モード限定で90°って事じゃないの?
その文章のもう少し下の文章じゃないかな?
全然読む場所違ってて草 PESA+レーダー本体のジンバル+追加のジンバルで90°も可能って事か
本家フォーラムのテクニカルモデレーターに聞いてみたら「この件については、社内で報告書を作成しました。」との事
不適切なコンテンツとして通報するには以下の「送信」ボタンを押して下さい。 現在このグループでは通報を匿名で受け付けていません。 管理者グループにはあなたが誰であるかがわかります。
どのように不適切か説明したい場合、メッセージをご記入下さい。空白のままでも通報は送信されます。
通報履歴 で、あなたの通報と対応時のメッセージを確認できます。

何その頭痛が痛いみたいなやつ
確かにめちゃくちゃ変なこと言ってて笑った。普通に調べて来たらPESAだったし運営のミス?それか他のPESA搭載機で同じようになるか検証するとか?PESA搭載機何か知らないけど
他のPESA搭載機(Su34)でも同様だったよ。PESAレーダーの動作速度はとんでもないからAESAみたいに本当に同時追跡してるんじゃなくて捜索中に一瞬だけビーム向けて更新してるのかも
位相変化だけでビームが曲げられる範囲内(su-30の場合はスキャンゾーンの中心から左右45度の範囲)なら常時更新されるってのは許せるとして機械走査でアンテナ自体を傾けて補ってる範囲まで常時更新されるのはちゃうやん!って話 上の枝に付いてる葉のリンクを機械翻訳でもいいから見てくれ最大±45°の電子走査って書いてあるから
ただまあ個人的には90°もあれば一番広いTWSの走査範囲よりなお10°も広いし実用上はそこまで問題は無いと思う。それよりは現状レーダーの俯仰角が±40なのが地味にきつい上のデータで±45°になってるがこれは修正されるのだろうか
ほなら上下も機械式で70°動くんとちゃうん
↑電子走査アレイなら機械的に動かないのでは?各素子が電気的に位相を変化させるから、機械的な部品が一切ないもんだと思ってたが・・・
>> 1126縦が40度なのは縦方向のジンバルが付いてないからだと思う
旧来のレーダーで言うところの機械走査はしない。それはAESAでもPESAでも同じ。位相走査範囲を広げるために首振りするものはある。ただそれを表現するならば”走査範囲”自体が左右に移動するのでWTのは未だなんちゃってフェーズドアレイでしかない。
いや上のリンクデータで俯仰角±45°だから現状の40°だとおかしくないということなんだが
PESAとAESAのハイブリッドであってるぞ。Su-30SMのN011Mは送信側にPESA、受信側にAESAの技術(LNAの3dB、独立した受信アンプなど、USやEUのAESAとよく似た技術)が使われてる。
このリンクの最大±45°電子スキャン(до ± 45° электронное сканирование)が事実ならレーダーが一番左の範囲をスキャンしていた場合画像の黄色部分にはビームを向けられないはずでこの範囲に敵が入ってもトラックが続くのはおかしくないか?と思っています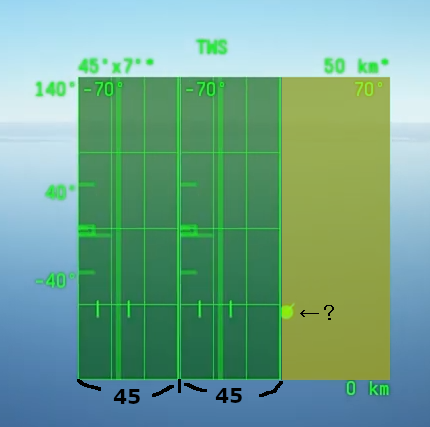
それを指摘するならAESAだろうと等しくおかしいだろうと言ってる。
AESA(ラファール,クフィル)は別にフェーズドアレイ+
機械走査ジンバルを使った首振りの組み合わせじゃなくてフェーズドアレイ単体で動いてるから上の画像で行ってる黄色の範囲は存在しないし問題ないと思ってる >> 1135さんはdevのA(P)ESAのアップデート内容確認してる?今のdevは一度発見した敵がスキャン範囲外に出ても座標の更新が行われるようになってるそこはgaijinが独自の仕様を作り出してるから分からん。完全に架空の仕様だよ。AESAが強くなりすぎないように(スキャンエリアを制限する意図?)よく分からん調整をしてるのかもしれない
常時更新される範囲はともかく±90°とする話の方が多いけどなリンク
多分この部分よね 90 degrees for surface search modesって事は対地モード限定で90°って事じゃないの?その文章のもう少し下の文章じゃないかな?
全然読む場所違ってて草 PESA+レーダー本体のジンバル+追加のジンバルで90°も可能って事か
本家フォーラムのテクニカルモデレーターに聞いてみたら「この件については、社内で報告書を作成しました。」との事